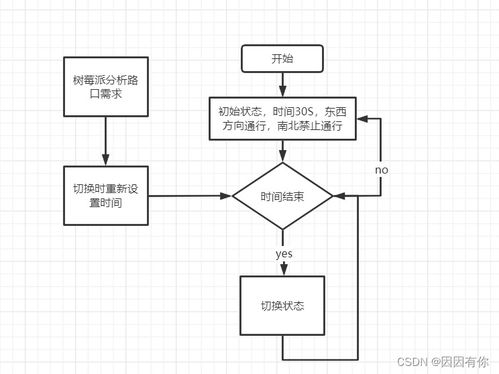
隨著城市化進(jìn)程的加速,交通擁堵和事故頻發(fā)成為亟待解決的問題。傳統(tǒng)的固定時交通燈控制方式難以適應(yīng)動態(tài)變化的交通流,亟需引入智能化技術(shù)。本文設(shè)計(jì)一種基于機(jī)器視覺的交通燈控制系統(tǒng),通過在關(guān)鍵路口部署攝像頭采集實(shí)時交通圖像,結(jié)合計(jì)算機(jī)視覺算法(如目標(biāo)檢測與運(yùn)動分析)識別車輛流量、排隊(duì)長度和行人群集密度,動態(tài)調(diào)整各方向信號燈的配時策略。系統(tǒng)無需額外的基礎(chǔ)設(shè)施建設(shè)即可從現(xiàn)有視頻流中提取特征,例如使用HOG或YOLO算法監(jiān)測車道占用情況,配合卡爾曼濾波器追蹤即時時速數(shù)據(jù)。主控制器基于嵌入式工業(yè)計(jì)算機(jī),以分組運(yùn)輸模式切換序列,從而顯著降低將亮?xí)r間延遲率并最優(yōu)化路口整體通行效率。所有功能模塊以模塊化架構(gòu)穩(wěn)定運(yùn)行于干擾環(huán)境,選用光隔離式警報且關(guān)閉暫護(hù)緩沖器件保障輸出的工業(yè)級別耐受率與工作有效性。實(shí)施結(jié)果顯示,系統(tǒng)在各季節(jié)情形識別干擾度覆蓋情況對應(yīng)輸出機(jī)制給城市智能交通提供了經(jīng)濟(jì)且精準(zhǔn)的領(lǐng)導(dǎo)模式架構(gòu)在支持上的拓寬藍(lán)圖為智能開發(fā)提供實(shí)際條件運(yùn)行成果。
基于機(jī)器視覺的交通燈控制系統(tǒng)設(shè)計(jì)
更新時間:2026-06-09 05:08:47
如若轉(zhuǎn)載,請注明出處:http://m.qiuxuewang.cn/product/38.html
PRODUCT
產(chǎn)品列表
-
更新時間:2026-06-09 23:30:22